
If you’re diving into the world of robotics with ROS2 (Robot Operating System 2), setting up a solid foundation is crucial. A well-organized workspace and properly structured nodes are the backbone of any successful ROS project. Whether you’re a beginner or a seasoned developer, this guide will walk you through creating and managing a ROS2 […]
Tag: robot
How to Make Lifelike Robots with a Soul

A common misconception is that robots need advanced AI algorithms to have fluid interactions with people. Another myth is that robots need to have some special shape to be engaging.There’s actually a better, simpler, and more elegant way! Secrets of Engaging Interactive Robots Guy Hoffman from Cornell University introduced a solution that requires 2 complementary […]
Polygon-Based 2D SLAM for Robotic Exploration
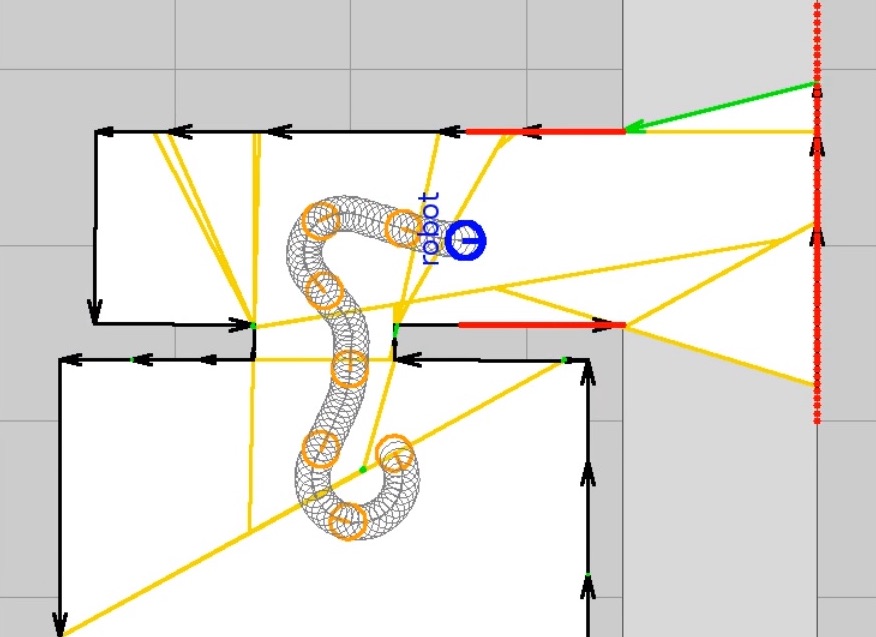
Johann Dichtl successfully defended his PhD, that I’ve co-supervised with Luc Fabresse and Guillaume Lozenguez. The defense took place this tuesday July 2nd, 2019 morning. The jury members were: Prof. Ouiddad Labbani from Université de Limoges, Dr. Mikal Ziane, HdR, from Université Paris Descartes, and Dr. Laetitia Matignon from Université Claude Bernard, Lyon 1. Title […]
Robots To Collect Garbage Floating in the Water

A loft of plastic litter (bottles, bags…) end up in harbours, marinas and canals. WasteShark, a robotic boat by a Dutch company (Rana Marine) takes care of collecting this floating waste. The robot behaves the shark whale style to clean urban waters. Video 1 shows WasteShark in action. Video 1 shows WasteShark in action Plastic […]
Open Source 3D Printed Humanoid Robots
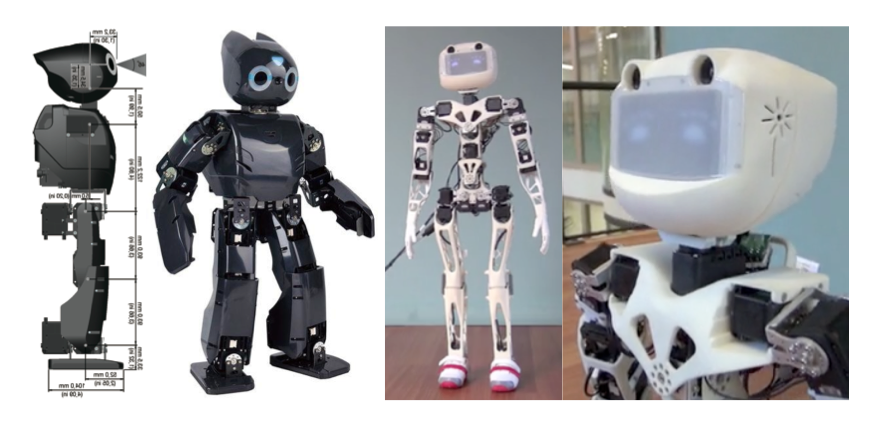
In this post we give an overview of major open source humanoid robots. Existing ones are interesting and seriously compete with the pre-built closed robots such as the Nao. One surprising conclusion is that going the open source route does mean cheap. Indeed humanoid robots have many degrees of freedom. Usually more than 20 servo […]
ArbotiX-M: The Arduino Compatible Board for Robots with Dynamixel Servos
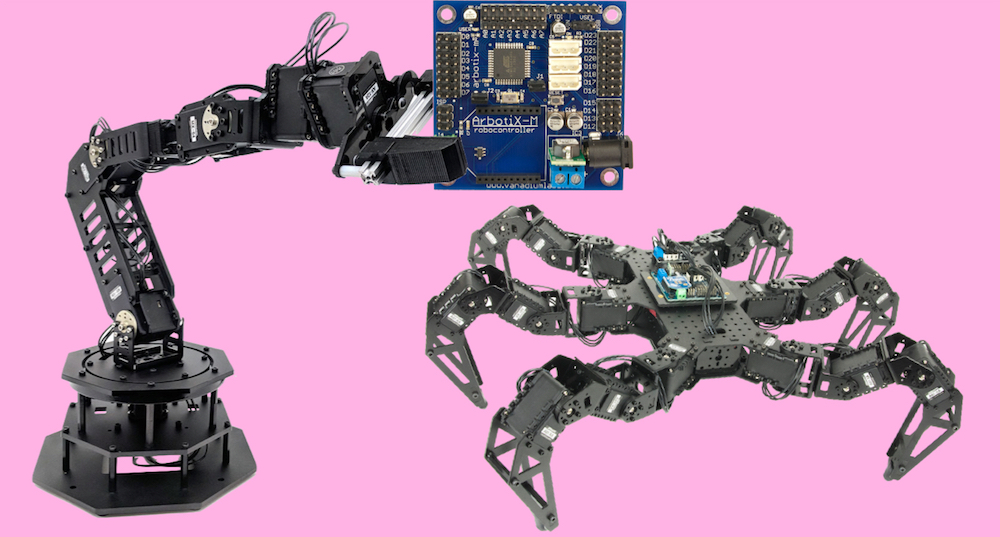
The ArbotiX is an open hardware (GPL 3 license) Arduino compatible board that can control up to 30 Dynamixel servo motors. It is ideal for building robots of various kinds (Legged robots, Robotic arms, …). In the following, we provide you with a detailed description of the ArbotiX-M board and its characteristics. Our code samples […]
Nao Humanoid Robot Can Write Arbitrary Text

Some of my students worked on this project. They used Pharo, ROS, as well as Choregraphe to make Nao write arbitrary text. Since the robot motion is not very precise, they made up a simple but smart solution to allow the robot can push the page after writing each letter. Source code is available on […]