
Open Source 3D Printed Humanoid Robots
Posted on |
In this post we give an overview of major open source humanoid robots. Existing ones are interesting and seriously compete with the pre-built closed robots such as the Nao. One surprising conclusion is that going the open source route does mean cheap. Indeed humanoid robots have many degrees of freedom. Usually more than 20 servo motors are required. However, those are robots that are mainly used for reaseach. Hobbyists can downsize the robots, and customize their shape to use fewer and smaller servo motors.
Poppy
The Flowers Lab, a french research team, is behind Poppy a humanoid which is 3D printed (see Video 1). They are have released both the hardware and the software under an open source license.
Although it is open, Poppy is still as expensive as other humanoids available on the market. Its total production costs approximatively $7,000, which is the price of the Nao from SoftBank Robotics.
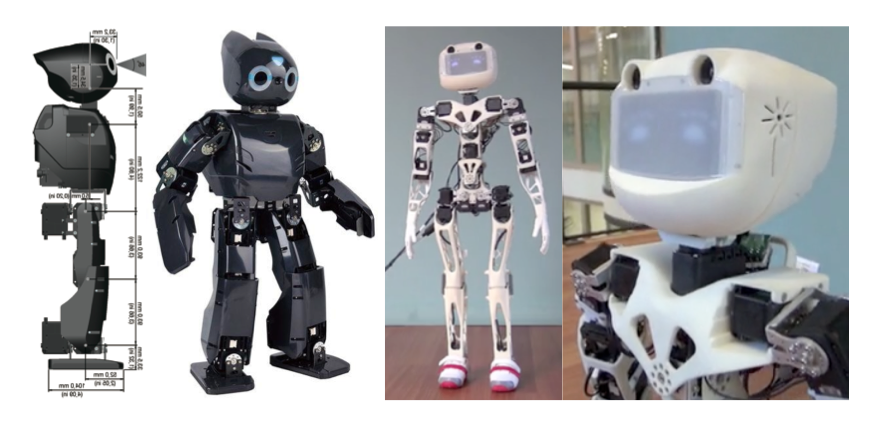
Robotis-OP (Formerly Darwin-OP)
Poppy is competing with yet another open source humanoid robots: the Darwin-OP from Robotis (see Video 2). Indeed the OP stands for Open Plateform. Files describing both Darwin-OP’s hardware (mechanics and electronics) and software are freely available from source forge.
An already assembled Darwin-OP costs about $10,000! But, some folks made their own Darwin-OP using a 3D printer for more or less the same price as Poppy. The process is documented.
Build Your Own Cheap Humanoid Robot
One of the reason Robotis-OP and Poppy are so expensive is related to the number and the power of servomotors they rely on. Those robots have many joints, which means as many servos. Beside, the scale of the robots implies the use of servos capable of delivering enough torque. Those are typically the Dynamixel MX servos that can cost up to $500 each!
There exist cheap and yet good enough servo motors that can be used for making simple humanoid robots. So, you can make your tiny humanoid for few hundred bucks. For example the Dynamixel AX12 cost about $40 each. They are also very easy to program, and share many interesting features with the MX series. This includes synchronized movements that allow controlling many servos at once. Ideal for programming bipedal walk or different gaits for legged robots.
This site uses Akismet to reduce spam. Learn how your comment data is processed.
Leave a Reply