
Polygon-Based 2D SLAM for Robotic Exploration
Posted on |
Johann Dichtl successfully defended his PhD, that I’ve co-supervised with Luc Fabresse and Guillaume Lozenguez. The defense took place this tuesday July 2nd, 2019 morning. The jury members were: Prof. Ouiddad Labbani from Université de Limoges, Dr. Mikal Ziane, HdR, from Université Paris Descartes, and Dr. Laetitia Matignon from Université Claude Bernard, Lyon 1.
Title
“On 2D SLAM for Large Indoor Spaces: A Polygon-based Solution”
Summary
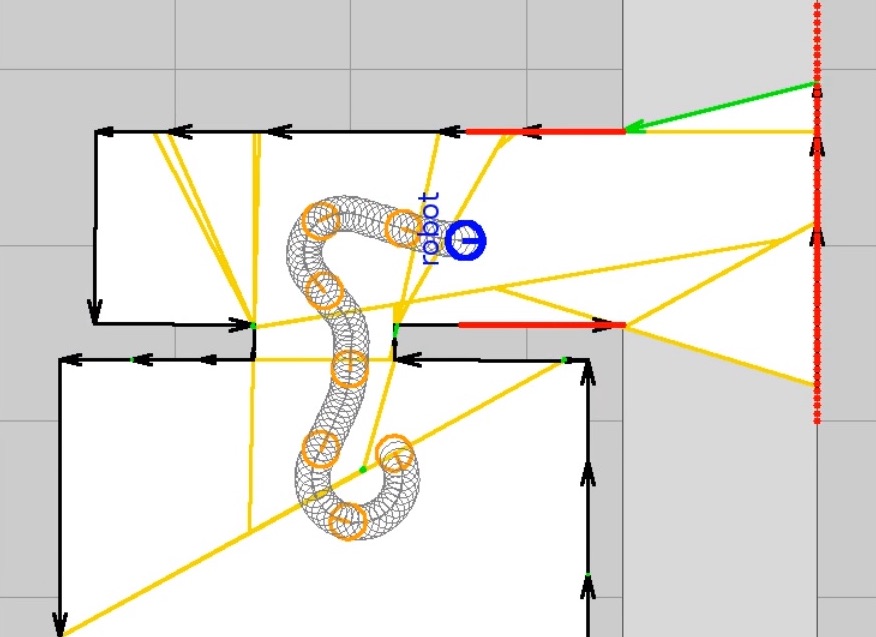
Indoor SLAM (Simultaneous Localization And Mapping) and exploration are important topics in robotics. Most solutions today work with a 2D grid representation as map model, both for the internal data format and for the output of the algorithm. While this is convenient in several ways, it also brings its own limitations, in particular because of the memory requirements of this map format. In this thesis we introduce PolyMap, a 2D map format aimed at indoor mapping, and PolySLAM, a SLAM algorithm that produces PolyMaps. We show that this solution is better suited for multi-robot exploration of indoor environment. These results are backed by series of simulations and experiments with actual robots running ROS middleware in a real world environments. The implementation has been done using Pharo.
Map Construction Video
Slides + Comments + Appendices
This site uses Akismet to reduce spam. Learn how your comment data is processed.
Leave a Reply